I’m trying to run ros code below on a LILYGO TTGO LoRa32 V1.0 ESP32 Development Board, but it is continually rebooting.
/*
used to debug rosserial running on ESP32 TTGO Board
*/
#define ROSSERIAL_ARDUINO_TCP
#include <ros.h>
#include <std_msgs/Empty.h>
ros::NodeHandle nh;
void messageCb( const std_msgs::Empty& toggle_msg){
digitalWrite(LED_BUILTIN, HIGH);
delay(200);
digitalWrite(LED_BUILTIN, LOW);
delay(200);
}
ros::Subscriber<std_msgs::Empty> sub("cmd_vel", &messageCb );
void setup(){
pinMode(LED_BUILTIN, OUTPUT);
Serial.begin(115200);
while (!Serial){delay(1000); }
delay(2000);
Serial.println("starting");
nh.initNode();
nh.subscribe(sub);
}
void loop(){
nh.spinOnce();
digitalWrite(LED_BUILTIN, HIGH);
delay(500);
digitalWrite(LED_BUILTIN, LOW);
delay(500);
Serial.println("looping");
}
This post [https://github.com/espressif/arduino-esp32/issues/4807](link url) suggested putting this code in the ros.h file which I have done because “…after some digging in the source code I found out that ROS opts to use a wifi connection over the serial connection if you program an ESP32 . If you want to circumvent this you can manually change the ros.h file…”, but the board continues to reboot.
#if defined(ROSSERIAL_ARDUINO_TCP)
#include "ArduinoTcpHardware.h"
#else
#include "ArduinoHardware.h"
#endif
I am using the Arduino IDE with esp32 by Espressif 2.0.7 package.
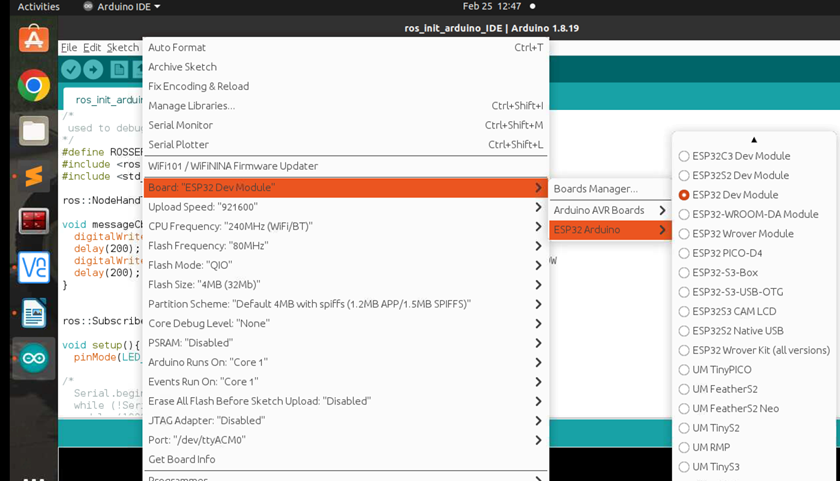
Based on https://github.com/Xinyuan-LilyGO/LilyGo-LoRa-Series?spm=a2g0o.detail.1000023.10.3c4a74e6RNWEq6 I have selected the ESP32 Dev Module.
One output verbose compilation message mentions: “…Using library Rosserial_Arduino_Library at version 0.9.1 in folder:…”
I don’t know where the issue is. I have tried 2 separate boards. The current TTGO board that has no wires connected to the board other than the USB connection. Other programs uploaded to the board work fine. If I comment out the ros related code the board works fine.
The reboot sequence message is:
assert failed: tcpip_send_msg_wait_sem IDF/components/lwip/lwip/src/api/tcpip.c:455 (Invalid mbox)
Backtrace: 0x40083549:0x3ffb1fa0 0x400882a9:0x3ffb1fc0 0x4008d9c1:0x3ffb1fe0 0x400df806:0x3ffb2110 0x400eb839:0x3ffb2140 0x400eb898:0x3ffb2160 0x400df53d:0x3ffb21b0 0x400d2eca:0x3ffb21d0 0x400d289a:0x3ffb2220 0x400d2421:0x3ffb2250 0x400d3bd2:0x3ffb2290
ELF file SHA256: 34fdf7d99cba0a23
Rebooting...
ets Jul 29 2019 12:21:46
rst:0xc (SW_CPU_RESET),boot:0x17 (SPI_FAST_FLASH_BOOT)
configsip: 0, SPIWP:0xee
clk_drv:0x00,q_drv:0x00,d_drv:0x00,cs0_drv:0x00,hd_drv:0x00,wp_drv:0x00
mode:DIO, clock div:1
load:0x3fff0030,len:1344
load:0x40078000,len:13924
ho 0 tail 12 room 4
load:0x40080400,len:3600
entry 0x400805f0
starting
assert failed: tcpip_send_msg_wait_sem IDF/components/lwip/lwip/src/api/tcpip.c:455 (Invalid mbox)
Backtrace: 0x40083549:0x3ffb1fa0 0x400882a9:0x3ffb1fc0 0x4008d9c1:0x3ffb1fe0 0x400df806:0x3ffb2110 0x400eb839:0x3ffb2140 0x400eb898:0x3ffb2160 0x400df53d:0x3ffb21b0 0x400d2eca:0x3ffb21d0 0x400d289a:0x3ffb2220 0x400d2421:0x3ffb2250 0x400d3bd2:0x3ffb2290
ELF file SHA256: 34fdf7d99cba0a23
Rebooting...
(repeats)….